Testing & Prototype
Our prototype contains small scale, commercially available, and easily accessible components. Our detection system utilizes a low resolution phone camera and a small scale radar detector. Our warning system utilizes scaled WRONG WAY signs with custom LEDs and a small scale LCD Dynamic Messaging Sign. The WRONG WAY sign and Dynamic Messaging Sign will be controlled using an Arduino Uno acting as a controller while the camera, radar detector, and GSM communication system will be controlled using a Raspberry Pi 3 acting as a field hardened computer. All of these components will be added to a scaled exit ramp to simulate real world conditions as closely as possible.
Testing was done on each individual component as it was added to the scaled exit ramp for functionality and feasibility for meeting our design criteria. Final testing was conducted to ensure the wrong-way driving vehicle is being detected for at least one system to trigger the warning system, our warning systems are functioning as expected, that both the camera and radar detector are detecting the vehicle ensuring no false call, and finally that the GSM communication system is relaying a message to the state department of transportation.
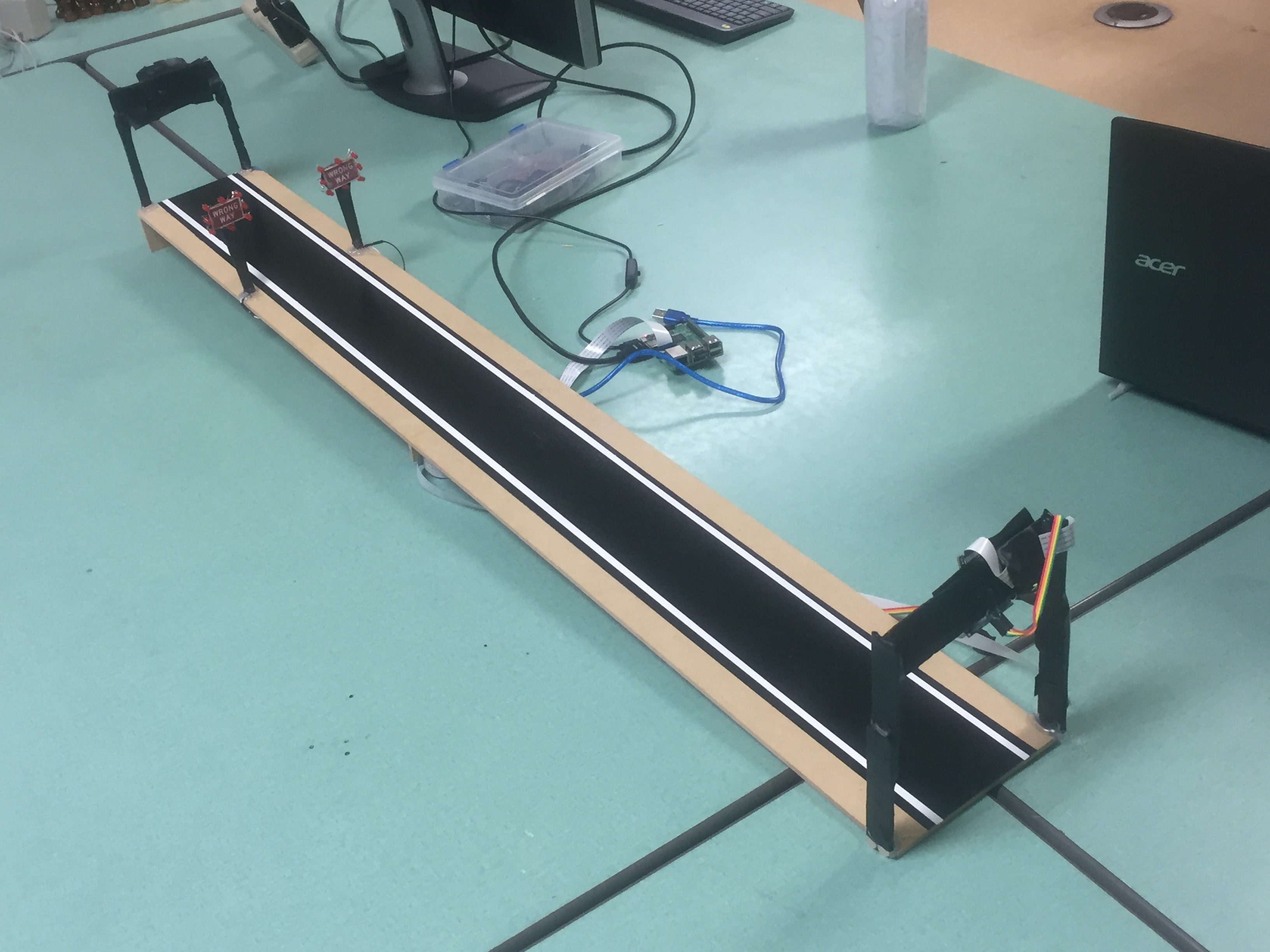
Prototype Finalized
Prototype that was used for the tests and to prove our concept.
Prototype Being Tested
Video of a test of the prototype.